

Unmanned Maritime Vehicle (UMV)
Today's unmanned vehicles can trace their roots back to the inventor of alternating current (AC), Nikola Tesla (1856-1943). Renowned for his work with AC motors, dynamos, hydroelectric power and X-ray technology, Tesla found time to invent the worlds first practical remote-controlled unmanned vessel. In 1898, Tesla was granted a U.S. patent for a "Method of and Apparatus for Controlling Mechanism of Moving Vessels or Vehicles." The patent covered "any type of vessel or vehicle which is capable of being propelled and directed, such as a boat, a balloon or a carriage." During an electrical industry trade show at Madison Square Garden in New York, Tesla publicly demonstrated his unmanned ship in a large tank of water. The historic event created some sensation about his method of using radio for command and control.
The war in Afghanistan demonstrated the key role video sensors on unmanned air vehicles (UAVs) could play in obtaining real-time intelligence and targeting data on mobile and moving targets. The use of networked, unmanned vessels and sensor platforms will provide greatly enhanced capabilities to the future naval force operating in littoral environments.
While adoption of unmanned aircraft is making amazing gains, unmanned maritime systems (UMS) have had slower progress. But during the next decade, a significant increase in the application of UMS is anticipated. Unmanned maritime systems, which include surface and underwater vessels, will provide enhanced capabilities to maritime administrators and operators with a significant reduction in costs. Studies predict an investment of billions of dollars will create a new generation of unmanned vehicles for various land, sea and air functions. The opportunity to operate at great depths without the need for life support systems for humans and the miniaturization of circuits which has led to much smaller sensors and much more onboard processing has opened up dramatically increased opportunities for underwater system with near full autonomous capabilities.
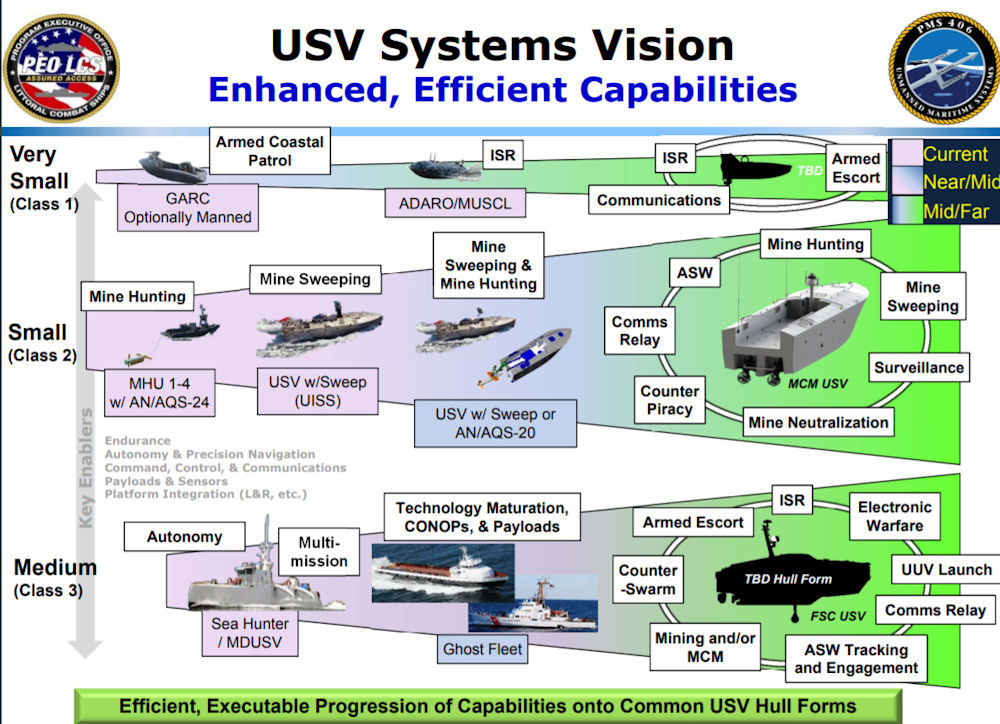
The US Navy's 2007 Unmanned Surface Vehicle (USV) Master Plan identified four classes of USVs, the largest of which was the Fleet Class USVs, 11 meter [36 feet] long planing or semi-planing hull craft. The Fleet Class USV would provide moderate speed/endurance while towing MCM sweep gear or high speed and very long endurance to support ASW, SUW, or EW missions. They also could support manned operation through the ability to remove and replace their mission systems in less than 24 hours.
NATO Allies learned from the experience of introducing unmanned vehicles in the air domain. At the Summit in Brussels in July 2018, NATO leaders endorsed the implementation of NATOs reinforced maritime posture. In support of this, on 03 October 20180, Defence Ministers from thirteen NATO Allies signed a declaration of intent to cooperate on the introduction of Maritime Unmanned Systems. This initiative will enable Belgium, Denmark, Germany, Greece, Italy, Netherlands, Norway, Poland, Portugal, Spain, Turkey, the United Kingdom and the United States to pool their resources, their talent and ingenuity to create better, more flexible and more interoperable unmanned, maritime vehicles and systems.
The term Unmanned Maritime Systems (UMS) refers to all systems, subsystems, associated components, vehicles, equipment and logistics for the operation of Unmanned Vehicles. These vehicles can be operated on the surface or underwater and may be remotely operated, partially or fully autonomous. The advancement of UMS technology to date has largely coincided with the requirements of the security and defence community, specifically for the challenges of Maritime Mine Countermeasures (MMCM). This has been facilitated by the availability of commercial off-the shelf products and the decreasing costs of electronic components. MMCM operations come with a high level of risk and have provided a successful test-bed for the use of autonomous systems. However, the growing tendency is that UMScan move beyond the challenges of MMCM and can be incorporated into many other security applications, as well as commercial applications.
For a small vessel with a relatively large crew, such as the MCM-1 class mine countermeasures ship, personnel costs represent 38 percent of the ships life-cycle cost, compared with 29 percent for a CG-47 class cruiser, which has seven times the displacement but only four times as large a crew.
The deployment of personnel, vessels and aircrafts for maritime applications requires intensive efforts and large operational costs. Nevertheless, it cannot provide sufficient coverage and resolution to ensure comprehensive and timely data availability for all areas and purposes. Unmanned marine data acquisition systems can help to overcome these limitations by providing timely and persistent data acquisition from the sea surface and beneath it. In this way, UMS can act as sentinels, enabling a more precise and selective approach in the deployment of conventional resources. As a result, many countries are adopting unmanned systems for improving the efficiency and reducing the costs of border and maritime patrolling operations, thereby increasing the demand for UMS.
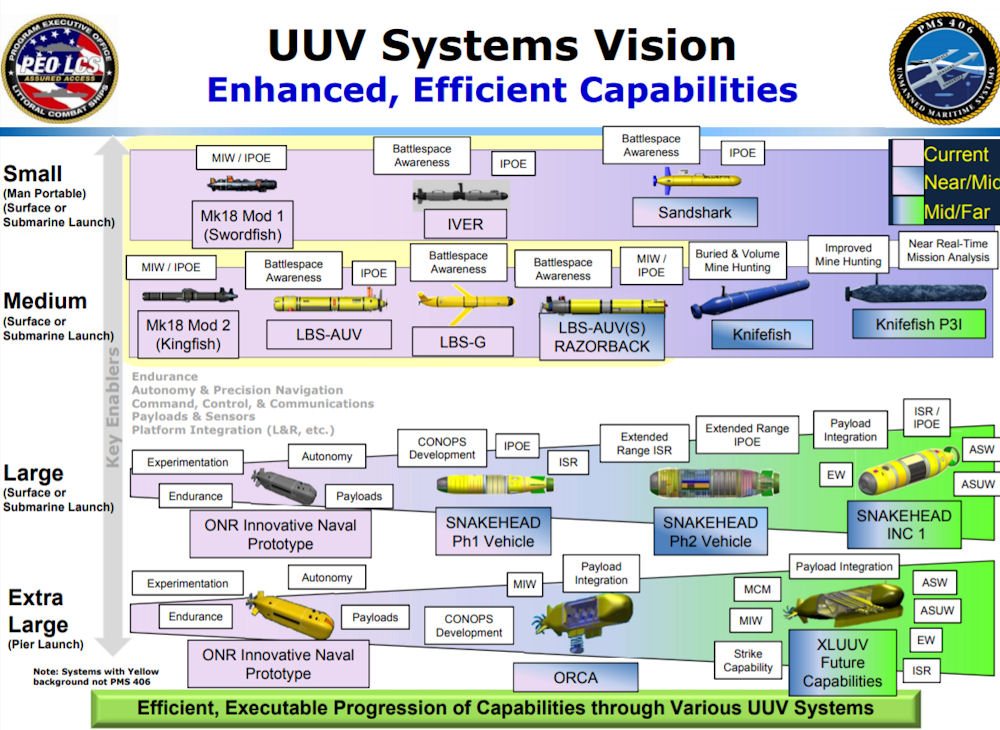
The Unmanned Maritime Systems (UMS) Program Office (PMS 406) within PEO Littoral & Mine Warfare (LMW), is chartered to develop, acquire, deliver, and support operationally effective, integrated Unmanned Maritime Systems (UMS) for the war fighter and to direct UMS experimentation and technology maturation efforts to meet the Fleets capability needs. UMS comprises Unmanned Maritimes Vehicles (UMV), which includes both Unmanned Undersea Vehicles (UUVs) and Unmanned Surface Vehicles (USVs), and fully integrated sensors and payloads as necessary to accomplish the required missions.
The military, public and commercial uses for an unmanned maritime vessel within the context of warfare, exploration, studies and surveillance at sea are numerous. The possibility of conventional platforms, such as ships and buoys, for the collection of data and information within these contexts are limited, in particular when compared to the extent of the oceans of the world. Ships are costly to build, man and operate. Buoys, either fixed or floating, provide in general only limited coverage. Even if some additional information can now be collected at a distance by satellites, these are more costly and their sensors can provide very limited information about the oceans.
Unmanned maritime systems are vessels designed to operate on-or-underwater without a human operator onboard, similar to drone aircraft. But there are questions about how they should be classified within maritime and armed conflict laws. First and foremost, what's the status of these things," said Norris. "Are they vessels? Are they warships? Are they torpedoes? How should unmanned maritime systems be classified under the law? That answer really drives a lot of the other issues. With a new generation of unmanned & autonomous systems, navies are optimising their strategic position by utilising these platforms for ISR (Intelligence, Surveillance and Reconnaissance), mine countermeasures, hydrography, anti-submarine warfare, and to deliver lethal capabilities.
With the simultaneous increase of unmanned maritime systems (UMS) and underwater threats, the development of more unmanned and autonomous maritime vessels will be underway. With the vast amounts of technological advancements, steering from unmanned vessels, to vessels with primarily autonomous features will be a process that wont remain stagnant for too long. The current UMS can perform dirty and dangerous missions without the direct presence of the operator. Increasing the autonomous features in the unmanned system would allow the seafarer to allot time to other operations while the AUV, autonomous underwater vehicle, would still be doing its job. UMSs can assist in conducting pertinent missions, from mine countermeasures, anti-submarine warfare, oceanography and communication/navigation network nodes.
A wide range of enemies, peer and non-peer competitors, hybrid threats, rogue states, hyper-empowered individuals and violent extremist groups are committed to defeating the US way of war. They reside in multiple regions of the world. Peers and adversaries are now focused on higher-end asymmetric capabilities that the US hadnt dealt with for a while. They had to evolve and learn to contest the USA in a variety of domains; similar to the same domains that have challenged the international order in the Pacific.
The emerging availability of unmanned surface capability is characterized by the broad capabilities of the platform, the multitude of companies that manufacture the technology, and the enabled, but limited, performance of existing prototypes. According to RAND Corporation, in an analysis of the US Navy employment of Unmanned Surface Vessels, the current USV market has approximately 63 identified within the market. Furthermore, current USV platforms range in missions and functions, but the majority of activity is focused on the following applications: Observation and Collection, Characterization of the Physical Environment, Maritime Security, Offensive Surface Warfare, and Electronic attack.
These applications transfer easily to the overall tactical and operational mission sets of the surface community. While these applications can prove to be viable within the context of surface warfare mission sets, there is little to no development in the use of these applications that are currently being applied in the surface and/or maritime environment.
The use of autonomous and unmanned systems can aid the fleet concept of distribution in that it leverages additional weapons and sensors over large areas of congested battlespace. Additionally, the operational use of autonomous unmanned systems can improve maneuverability in a way that optimizes operations and strategic depth of the force. It adds speed and agility to the force, thereby challenging the adversarys ability to engage fixed forces.
The operational use of autonomous unmanned vessels forces the adversary to maintain a defense posture, taking the focus away from the movement and targeting of manned units. They would be forced to allocate critical and limited resources across a larger set of defended targets, and away from the manned organic units which continue to advance into contested water space.
With the Navys focus on the development and fielding of UUVs, there is a heightened need for efficient vehicle propulsion systems. These systems will allow the respective UUV to realize and achieve its maximum range, duration, and capability. As a result, energy management and efficient propulsion remains a fundamental limitation of UUVs. As more stress is placed on autonomy requiring more power intense sensors and computing, not having to compromise range and duration will necessitate the most efficient use of power for propulsion.
The modular components can be used with "any" (COTS (commercial off-the-shelf) or GOTS (Government off-the-shelf)) sensor suite to fuse data and determine the operating environment (surface contacts/tracks) and feed an autonomy decision engine to improve the vessel arbitration process in deciding which way to turn, how fast to go, obstacle avoidance, and mission monitoring. The embodiments are intended to equip ACTUVs with the ability to obey the set of navigation rules published by the International Maritime Organization. Generally referred to as COLREGS (collision regulations). The COLREGS determine, in the event of an encounter between vessels, which vessel has the right of way (i.e., the "stand on" vessel) and the appropriate behavior for both the "stand on" and "give way" vessel to avoid a collision.
International Maritime Organization (IMO) regulations and laws governed under (COLREG) currently prevent autonomous unmanned systems from being tested at sea with no lookout onboard. Although, autonomous system technology is maturing, the maritime law standards do not allow leniency in testing without a man onboard an unmanned platform. It is a regulatory conundrum considering 50-80% of all collisions are caused by human error. Rolls Royce is leading the way with trying to develop and use autonomous vessel technology and have a commercial system in use by the end of the decade. They are also spearheading efforts to change IMO regulations.
Like many current unmanned aircraft systems, UMS command and control will be transmitted via radio frequency links between the control station and the unmanned systems. For safe operations of an unmanned maritime system, highly reliable radio communications between the UMS and the maritime control station are required to support sense and avoid functions. In the end, unrestricted and autonomous unmanned maritime systems operations will rely on critical communications.
Current traffic management relies heavily on the internationally used Automatic Identification System. AIS is a tracking system used on ships and by vessel traffic services for identifying and locating vessels by electronically exchanging data with other nearby ships and AIS base stations. The AIS provides information such as vessel unique identification, position, course and speed. New operational requirements for a future maritime data link environment will need to be developed. In some environments, additional radio frequency links called vessel traffic control relay will be required to relay communications received and transmitted by unmanned maritime systems. Reliable radio frequencies to support relayed command and control are vital and must be considered along with the "sense and avoid" support requirement. These communications are especially critical for safe navigation in high-traffic maritime areas. In the near future, international standards may be necessary to develop these types of communications.
Another critical priority for operating unmanned maritime systems is the seamless integration into the global maritime communication environment. Unmanned maritime systems will use the same equipment as manned vessels to communicate with vessel traffic control. However, due to the remote nature of human interaction, command and control are vital to operating unmanned maritime systems and will influence the eventual development of composite electromagnetic spectrum requirements.
An unmanned maritime system must be able to operate in both high and low density sea environments. The vessel traffic control system may not be able to restrict an unmanned maritime system to low-density space. Larger systems are likely to be equipped with terrestrial communication capabilities such as geostationary satellite links. However, the impact of latency on unmanned maritime systems' command-and-control systems will be critical when considering the safety of operations.
If the decision to fire a weapon is based on an algorithm that's implanted in it, then how can a fleet commander use that asset and still comply with some of the law of war principles? The autonomy architecture is designed for an independently deployable unmanned vessel and is based on a hybrid combination of hierarchical and tactical behaviors. The autonomy architecture is critical to mission success for the ACTUV by providing the Unmanned Vessel (UV) the agility to think and act in parallel. The autonomy architecture generates deliberative planning target tracking while simultaneously reacting to the requirements of the COLREGS and responding properly to developing tactical situations.
The Unmanned Systems Integrated Roadmap describes the full range of unmanned systems operated by the DOD, specifically that unmanned maritime systems (UMS) are divided into unmanned underwater vehicles (UUVs) and unmanned surface vehicles (USVs), collectively known as unmanned maritime vehicles (UMVs). Unmanned Maritime Systems UMS comprise unmanned maritime vehicles (UMVs), which include both unmanned surface vehicles (USVs) and unmanned undersea vehicles (UUVs), all necessary support components, and the fully integrated sensors and payloads necessary to accomplish the required missions. While funding for UMS was falling 45% across the FY2013-2018 FYDP, future UMS inventories continue to rise. Indeed, as new littoral combat ships arrive in service, support UMS will rise in number.
The Navy currently has a number of UMS that perform a variety of missions including mine countermeasures, maritime security, hydrographic surveying, environmental analysis, special operations, and oceanographic research. The acquisition and subsequent delivery to the combatant commander requires an acquisition strategy that can keep up with the pace of technology development as well as capability requirements.
UMS may be used for a variety of purposes. They can ensure security within harbors, scan for problems on a ship hull, sweep an area for mines, secure critical waterways, provide ocean tracking, and more. Because of the operating environment, the technology that allows these capabilities is unique. Like UAS, persistence is a key capability that UMS can provide; however, unlike UAS, UMS allow more than just persistence. For example, the largest issue with UAS is their inability to operate in bad weather or low visibility. UUVs, on the other hand, can operate in poor weather conditions. Therefore, DoD can continuously scan for mine drops or follow an enemy threat such as a submarine. In any case, persistence requires improved power and propulsion systems, autonomy and data processing, improved communication systems, and advanced sensors.
The intended physical operating environments for UMS are in and around harbors, strategically placed within major shipping routes such as the Strait of Hormuz, or possibly out in the open ocean. Although maneuvering with no roads and no water traffic controller, USVs must be capable of avoiding ships, docks, floating debris, and navigation aids and must stay within proper navigable waters (i.e., not run aground). In addition, USVs must operate in accordance with the International Regulations for Preventing Collisions at Sea (COLREGS). Because not all maritime traffic (including military and commercial) always follows the COLREGS, however, autonomous behavior is more difficult to develop for USVs.
On the other hand, although UUVs have the risk of running into underwater obstructions, they do not typically have to worry about other vehicles. Furthermore, there are also no navigation rules for underwater operation. For UUVs operating in a stressing environment such as open ocean, the technology must be capable of providing enough power to last long durations of time while autonomously performing their missions even when communication links are limited.
On December 15, 2016, China seized a United States Navy unmanned maritime system (UMS) in the South China Sea. The UMS, known as an ocean glider, was used by the Navy to gather oceanographic data in the region. Despite protests by the United States, the Chinese did not return the UMS for several days. A little over a year later, Houthi rebels reportedly seized another United States Navy UMS off the coast of Yemen, although circumstances behind this second incident remain unclear.
|
NEWSLETTER
|
| Join the GlobalSecurity.org mailing list |
|
|
|