

Snakehead Large Displacement Unmanned Underwater Vehicle (LDUUV)
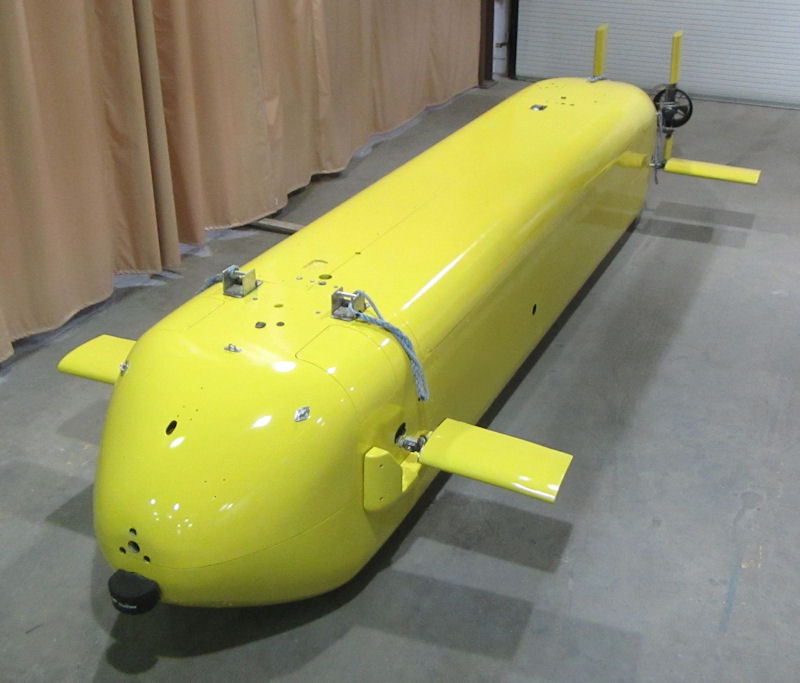 The Snakehead Large Displacement Unmanned Underwater Vehicle (LDUUV) is a new class of large-displacement unmanned undersea vehicles that will provide increased endurance, range and payload capabilities. The system is being designed for intelligence, surveillance and mine countermeasure missions, and is based on a modular, open architecture that will allow the Navy to incrementally develop new mission sets for the craft. LDUUV will be capable of being stowed, launched and recovered by multiple-host platforms, including littoral combat ships, Virginia-class submarines and Ohio-class guided-missile submarines. The craft is being developed by the Unmanned Maritime Systems Program Office, which is part of the Program Executive Office Littoral Combat Ships (PEO LCS).
The Snakehead Large Displacement Unmanned Underwater Vehicle (LDUUV) is a new class of large-displacement unmanned undersea vehicles that will provide increased endurance, range and payload capabilities. The system is being designed for intelligence, surveillance and mine countermeasure missions, and is based on a modular, open architecture that will allow the Navy to incrementally develop new mission sets for the craft. LDUUV will be capable of being stowed, launched and recovered by multiple-host platforms, including littoral combat ships, Virginia-class submarines and Ohio-class guided-missile submarines. The craft is being developed by the Unmanned Maritime Systems Program Office, which is part of the Program Executive Office Littoral Combat Ships (PEO LCS).
The LDUUV is a pier- launched and recovered UUV (without the need for ship-launch or recovery) with the capability to transit in the open ocean and conduct over-the-horizon missions in littoral waters. This system will enable the extension of Navy platform sensing capability over the horizon and extend its influence. The creation of this UUV is intended to act as a significant force multiplier for the US Navy and will help close Warfighter gaps in a cost-effective manner.
The 2004 UUV Master Plan laid out a vision for the modularity of the vehicle to increase as the size of the vehicle increased. This is realized in the desired end-state of the LDUUV. The LDUUV is a developmental large-displacement unmanned undersea vehicle. It will provide a new range of capabilities and longer range due to the larger size. The Program Executive Office Littoral Combat Ship (PEO LCS, 2015) states, The system is being designed for intelligence, surveillance and mine countermeasure missions, and is based on a modular, open architecture that will allow the Navy to incrementally develop new mission sets for the craft.
The Office of Naval Research (ONR) is designing the LDUUV to be the truck and allow the modularity of the vehicle to lend itself to packages that can be quickly interchanged. The packages can be exchanged as needed for a full spectrum of missions, and can advance with the maturation of technologies still in development. The LDUUV will be able to be employed by multiple-host platforms, to include submarines utilizing the Virginia Payload Module and the Ohio-class guided-missile submarines.
The Office of Naval Research (ONR) in 2011 released two broad agency announcements to industry. The first was the Large Displacement Unmanned Underwater Vehicle (LDUUV) Innovative Naval Prototype (INP) Energy program. The Large Displacement Unmanned Underwater Vehicles Innovative Naval Prototype technology BAA was to develop the critical technologies needed to enable UUVs to operate and survive in the littorals for 70+ days. Two technology areas have been identified as critical to achieving this goal. These areas are Autonomy and Endurance Technologies.
The overall objectives of the Autonomy development of this LDUUV INP Science and Technology (S&T) program would operate within this two-phased approach.
- Autonomy Phase I: Development of LDUUV autonomy hardware and software for mission durations of up to 30 days in benign littoral environments. It will be assumed that only vessels over 30 gross tons will be operating in the area. Operator assistance can be requested from the UUV when the scenario is too complicated over satellite communication (Iridium or similar).
- Autonomy Phase II: Development of LDUUV autonomy hardware and software for mission durations of 70+ days that can operate without human interaction in specified areas. The mission profile will include open ocean transits and littoral water navigation. Obstacle avoidance includes all vessels that operate in the littorals. Fishing can be moving and may operate anywhere in the UUV operating area. Operator assistance is not allowed from the UUV in specified areas. Once outside the specified areas, operator assistance can be requested from the UUV when the scenario is too complicated over satellite communication (Iridium or similar).
ONR sought full technical proposals for the phased development of vehicle autonomy technologies capable of the performance characteristics described for the following autonomous navigational challenges:
- Undersea Obstacle Avoidance Automated detection of undersea stationary and moving obstacles and associated avoidance maneuvers conducted in an autonomous manner by the vehicle. Path planning algorithms to minimize energy consumption during maneuvers.
- Surface Obstacle Avoidance Automated surface vessel detection and classification. Autonomous processing that determines location planning (including depth) and scheduling for communications using pre-determined risk factors and prioritized communications path choices.
- Surface Vessel Intent Automated characterization of surface vessel behavior to determine probability distribution of vessel type and activity, including fishing, military, recreational, and commercial activity. Advanced autonomy algorithm development to determine optimal maneuvering in the presence of the activity while maintaining mission priorities.
- Fishnet Detection, Avoidance, and Extraction New sensors and processing for the detection of fishing nets, including mono-filament and twine nets which are difficult to detect with current sensing systems. Development of new autonomy algorithms for net avoidance and extrication. Vehicle hardware upgrades to minimize risk of fish net entanglement.
Unexpected challenges may arise during autonomous operations, so the autonomy should be flexible to account for unknowns.
The Naval Sea Systems Command received a risk-reduction decision approval 17 August 2015, known as a Milestone A decision, for the Large Displacement Unmanned Underwater Vehicle (LDUUV) program. Milestone A approval grants the program the authority to move into the next phase of development, which will allow the Navy to commit resources to mature technology and reduce risks prior to production and fielding.
Following the successful Milestone A decision, a draft LDUUV request-for-proposals was released, with an industry day 14 September 2015 in Washington, D.C., at which the Unmanned Maritime Systems Program Office hosted a presentation and discussion for the industry community on LDUUV requirements. PEO LCS is affiliated with Naval Sea Systems Command, and provides a single program executive responsible for acquiring and sustaining mission capabilities of the littoral combat ship class, beginning with procurement and ending with fleet employment and sustainment. The combined capability of LCS and LCS mission systems is designed to dominate the littoral battle space and provide U.S. forces with assured access to coastal areas.
The 2015 Program Guide said, The Navy will achieve an early operational capability in FY 2017 by converting three ONR LDUUV INP vehicles into user operational evaluation systems to begin development of tactics, techniques and procedures. LDUUV initial operational capability is expected in FY 2022. The proposed cut in requested funding had an effect on technology maturation and fielding of the INP vehicles, thus affecting the schedule and risking cost increases to the program.
The LDUUV achieved Milestone A in 2014 and was progressing in a more traditionally open market competitive acquisition framework until early in 2016. The change in the LDUUVs acquisition strategy came in March of 2016 when NAVSEA stated it would no longer solicit proposals from industry, but that Naval Undersea Warfare Command (NUWC) would lead the design and fabrication of the LDUUV prototypes. ONR was attempting to expedite the maturation of technology readiness and deliver the latest technology to the Fleet with their government-led design approach while at the same time reducing risk.
The October 2016 DSB Study on Next-Generation Unmanned Undersea Systems was "concerned that the Large Diameter UUV (LDUUV) Program may be headed down the same path of prior UUV programs that encountered acquisition problems and cancellation. While the task force recognizes that the requirements for LDUUV are important, the anticipated cost of a delivered system is high and will likely result in only a small number being produced, which will limit both experimentation and the number of simultaneous missions that can be supported during the next several years. An alternative evolutionary approach based on URCI and APB/ARCI principles and using low-cost COTS platforms with commercial and Government payloads will enable increased experimentation, support a large number of missions, and provide the Navy with a deeper understanding of and appreciation for the utility of unmanned undersea systems and related technology. The task force also believes that the LDUUV program is not adequately leveraging prior Navy research in autonomy that has created a government-owned architecture, such as the Maritime Open Architecture Autonomy (MOAA). Prior DoD studies on autonomy have stressed the importance of avoiding locking the government into acquiring autonomy software only from specific vendors by exploiting the advantages of open architectures and government ownership."
On 29 October 2020 the Draft RFP was posted on the Bidders Library. The LDUUV RFP documents (including draft release of documents), Bidder's Library, and communications with industry (including Industry engagement) contain controlled information. Potential Offerors interested in viewing any of the data associated with the LDUUV RFP must complete and return 1) a Terms of Use Agreement; and 2) a Security Classification Specification, DD 254 (Block 6.a., 6.b. and 6.c.). Offerors must be active DoD contractors to access the data within the draft RFP. A blank Terms of Use Agreement and DD 254 were attached to this synopsis. Offerors should complete and return both documents now in order to expedite the review of the draft RFP documents.
On 23 December 2020 the Official RFP has been posted on the Bidders Library for LDUUV. With this solicitation, the government plans to competitively award a contract to a single vendor for fabrication of two prototype vehicles in fiscal year (FY) 2021.
|
NEWSLETTER
|
| Join the GlobalSecurity.org mailing list |
|
|
|