

Sea Hunter
Anti-Submarine Warfare Continuous Trail Unmanned Vessel (ACTUV)
Medium Displacement Unmanned Surface Vehicle (MDUSV)
As of 30 January 2018, Defense Advanced Research Projects Agency (DARPA), announced the formal transition of research to the Office of Naval Research (ONR). The Leidos built unmanned surface craft is now being designated as a Medium Displacement Unmanned Surface Vessel (MDUSV). The MDUSV is equipped with navigation and piloting sensors, electro-optics, and long and short range radar. The MDUSV's modular design allows it to not only carry out anti-submarine warfare operations, but to be refitted for intelligence, surveillance, and reconnaissance missions. In addition, the vessel is able to report back on the situation and its condition and has computers programmed to identify other vessels and predict what they will do next.
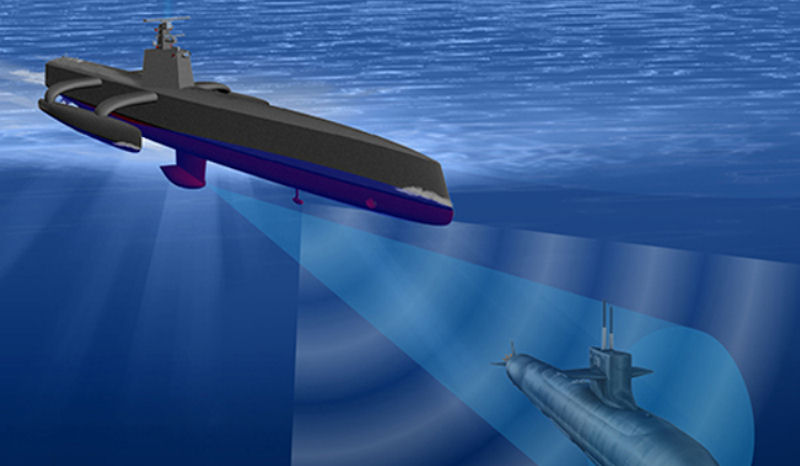
The increasing number of diesel-electric submarines presents a challenge to the United States naval forces. Accordingly, there is a critical need to offset the risk posed by such small and quiet subs. In order to do so, the ability to locate and track the subs is of paramount importance. To meet this need, the Defense Advanced Research Projects Agency (DARPA's) is supporting the ACTUV project to develop an unmanned surface vessel that will be able to locate and track submarines deep under the water, at levels of precision, persistence and flexibility beyond those capabilities available by manned surface ships operating anti-submarine warfare. Such capabilities will become particularly important as the US Naval missions are focused toward littorals in the Hormuz Straits, the Persian Gulf, South China Sea, East Africa, the Mediterranean and the Caribbean Sea.
The vessel is designed to operate fully autonomously, thus providing a forward deployed and rapid-responsive asset in the global maritime surveillance network. With the planned implementation, the ACTUV is intended to be capable of rapid response and autonomous travel to arrive as soon as possible in the area of operation. In order to achieve the advanced level of autonomy required to enable independently deploying systems to operate on missions spanning thousands of miles in range and months of endurance, under a sparse remote supervisory control model, the ACTUV autonomous operations must comply with maritime laws and conventions for safe navigation. More particularly, the system and method must be able to autonomously collect and process data to guide the vessel arbitration process in deciding which way to turn, how fast to go, obstacle avoidance, and mission monitoring.
Sea Hunter is a 132-feet long, autonomous, medium-displacement unmanned surface vessel (MDUSV). The vessel is designed for long-endurance operations and is self-deploying it does not have to be carried to the operating area by another vessel. The technical breakthrough is in the autonomy. Sea Hunters autonomous control system allows it to operate while avoiding hazards and in compliance with International Regulations for Preventing Collisions at Sea. Sea Hunters autonomous control system leverages components of ONRs CARACaS (Control Architecture for Robotic Agent Command and Sensing) system that has been developed by ONR used in the USV Swarm multi-USV demonstrations in 2014 and 2016. USV Swarm has demonstrated mission-specific behaviors such as escort, attack, patrol, intercept, track and trail. These behaviors are what provide a USV a mission capability. Behaviors such as these will be added to Sea Hunter and will be evaluated in future fleet experimentation. Inclusion of autonomous control is a significant advancement in USV capability.
The DARPA Anti-Submarine Warfare Continuous Trail Unmanned Vessel (ACTUV), now ONR's Medium Displacement Unmanned Surface Vehicle (MDUSV), is a self-deployed surface unmanned system capable of on-station times of 6090 days with ranges of 90010,000 nautical miles depending on speed (324 knots) and payload (520 tons). In its ASW role, it receives off-board cueing and hand off, then conducts an overt trail with active sonar. It can act as an ASW scout in coordination with area ASW assets like the P-8, conducting large acoustic surveillance using passive and/or active bistatic Surveillance Towed Array Sensor System (SURTASS). It can deploy three Mk-54 or six CRAW torpedoes. In its ISR role, it can work with a surface adaptive force package as an advanced scout employing passive RF, IO/IR and UAV sensors, and in an offensive role, can carry eight RBS-15 surface-to-surface missiles.
In the United States, work is underway to create automatic sea apparatuses designed for the detection and long-term tracking of enemy submarines at considerable distances from their bases. Since 2010, on the request of the Department of Defense's Advanced Development Administration (DARPA), work has begun on a program to create an unmanned vehicle for long-term tracking of enemy submarines ACTUV (Anti-Submarine Warfare Continuous Trail Unmanned Vessel).
On a competitive basis, the American company Science Applications International Corporation was selected as the lead developer of the device. The ACTUV device must follow the submarines at a distance of up to 3,000 km from its base in remote or autonomous mode. The range of navigation apparatus will be more than 6,000 km, and autonomy - 80 days. The device will float at the periscope depth and search for enemy submarines using an active hydroacoustic station. If a submarine is detected, the device will continuously monitor it and transfer information about the coordinates to the control center and its anti-submarine forces. According to the requirements of DARPA, the device must carry out three patrols per year (each with a cycle of 80 days at sea and 40 days of service at the base), have a lifetime of 15 years and cost no more than $ 20 million. The control system of the apparatus must be highly autonomous, allow independent actions in case of significant interruptions in communication with the control center and enable them to make decisions independently in various tactical situations. The device will have a warning system for collisions at sea.
By the beginning of 2013, the conceptual scheme of the device was chosen, the possibility of its creation was confirmed and the requirements for onboard equipment were refined. The displacement of the device will be 157 tons, length - 19.1 m, width - 5.8 m, maximum speed - 27 knots. Onboard the ACTUV there are active-passive sonars operating in the mid and high frequency range. The former are able to detect underwater targets at long distances, and the latter serve to clarify their parameters. Additional information is collected by arrays of magnetometers with digital signal processing. At short distances, an ultra-high-frequency sonar is activated to obtain an accurate acoustic image of the target and its automatic classification. On the ACTUV is not installed any weapons. This is only a marine reconnaissance robot for the coast guard, escorting ships and searching for submarines. It is assumed that the drone will act in two scenarios: as an autonomous coast guard patrol or as part of the AUG PLO division. By mid-2016, the ACTUV running tests were completed.
In 2012, the United States Navy Office ONR launched the Large Displacement Unmanned Underwater Vehicle (LDI) program, which includes the creation of an automatic underwater vehicle that can search and track submarines for a long time. This apparatus, unlike the ACTUV apparatus, will function in a submerged position. The duration of the autonomous patrol of the vehicle must be at least 70 days. The device is designed for action at great depths and with difficult bottom relief. The software and systems of the device must provide detection and circumvention of various obstacles, detect the presence of other vessels within a radius of 4 km. It does not exclude the installation of weapons on it. Tests of the device were scheduled for 2018. The duration of the development will be 4.5 years.
Devices such as ACTUV and LDUUV can be used to identify Russian submarines with ballistic missiles in the waters of the patrols, as well as in the areas of their exit from their bases. Given the greater autonomy and range of such devices, the possibility of organizing continuous tracking of the identified underwater strategic missile carriers during their entire combat campaign is not excluded.
The Anti-Submarine Warfare Continuous Trail Unmanned Vessel (ACTUV) program, funded by the US Navy's Office of Naval Research and Space and Naval Warfare Systems Command, is responsible for Sea Hunter, which displaces about 135 tons. In April 2016 the Navy celebrated the Sea Hunters first test firing of a payload. The prototype was "christened" in Portland, Oregon in April 2016, before an 18-month trial run to test its long-range utility.
What DARPA thinks make the Sea Hunter unique, however, are sophisticated sensors which can locate virtually silent enemy submarines. Retrieving the underwater GPS coordinates of stealthy diesel-electric submarines in busy waterways is akin to "trying to identify the sound of a single car engine in the din of a major city," Rear Adm. Frank Drennan, a senior anti-submarine warfare official said 10 January 2017.
The autonomous surface ship dubbed the Sea Hunter was officially passed along to the US Navy after completing two years of testing in the Defense Advanced Research Project Agencys (DARPAs) incubator. The Sea Hunter is designed for anti-submarine warfare and could revolutionize naval warfare as it is "the first of what could ultimately become an entirely new class of ocean-going vessel able to traverse thousands of kilometers over open seas for months at a time, without a single crew member aboard," DARPA said in a 30 January 2018 announcement. While it's not clear when the Office of Naval Research will transfer the ship into the regular fleet for everyday operations, DARPA's statement hints that it could be integrated with the rest of the US Navy by the end of 2018. The Sea Hunter's name is somewhat misleading as to the vessel's capabilities. The 127-foot-long ship is outfitted strictly for surveillance and is not equipped with any weapons, due in large part to the fact that it has no human at the helm.
The Anti-Submarine Warfare (ASW) Continuous Trail Unmanned Vessel (ACTUV) is developing an unmanned vessel optimized to robustly track quiet diesel electric submarines. It is optimized for quiet diesel electric submarine track and trail; not a wide area ASW search system. The program is structured around three primary goals:
- Explore the performance potential of a surface platform conceived from concept to field demonstration under the premise that a human is never intended to step aboard at any point in its operating cycle. As a result, a new design paradigm emerges with reduced constraints on conventional naval architecture elements such as layout, accessibility, crew support systems, and reserve buoyancy. The objective is to generate a vessel design that exceeds state-of-the art platform performance to provide propulsive overmatch against diesel electric submarines at a fraction of their size and cost.
- Advance unmanned maritime system autonomy to enable independently deploying systems capable of missions spanning thousands of kilometers of range and months of endurance under a sparse remote supervisory control model. This includes autonomous compliance with maritime laws and conventions for safe navigation, autonomous system management for operational reliability, and autonomous interactions with an intelligent adversary.
- Demonstrate the capability of the ACTUV system to use its unique characteristics to employ non-conventional sensor technologies that achieve robust continuous track of the quietest submarine targets over their entire operating envelope.
While the ACTUV program is focused on demonstrating the ASW tracking capability in this configuration, the core platform and autonomy technologies are broadly extendable to underpin a wide range of missions and configurations for future unmanned naval vessels.
The Sea Hunter is designed to hunt and track submarines for weeks on end. Officials with the Defense Advanced Research Projects Agency (DARPA) said that the agency and the contractor Leidos will be ready to unveil Sea Hunter, an unmanned underwater prototype, sometime in April 2016.


Building the first ship of a class carries numerous inherent risks. Construction of the vessel aside, the real science, and hence the majority of the program risk, is in developing an autonomy system that can (1) sense its environment and the health of its own systems, (2) make intelligent decisions to optimize machinery lineups and sensor employment, (3) avoid other ships and obstacles, and (4) execute the intended mission. So, when tasked with developing this maritime autonomy suite for ACTUV, where do you start, and how do you limit the risk in designing the autonomy architecture to meet such complex requirements?
The Leidos teams first step in risk reduction for ACTUV was to leverage code already written for less complex autonomous systems. In the 1990s, the NASA Jet Propulsion Laboratory (JPL) developed the Control Architecture for Robotic Agent Command and Sensing (CARACaS) for the Mars Rover Project. CARACaS already has been successfully adapted for several unmanned surface vessel programse.g., for the work done by DARPA in developing Grand Challenge I and II and for the Urban Challenge architecture for an autonomous ground vehicle. Leidos leveraged the work done by JPL in developing CARACaS and by DARPA in developing Urban Challenge (NREC Engine) to develop a maritime autonomy capability that uses open standards, libraries and tools.
The ACTUV autonomy suite contains decision algorithms embedded as software modules using an object-oriented framework in which key interface definitions isolate algorithm implementations. It supports multiple, simultaneously executing decision engines and the arbitration logic to choose the best decisions for future actions. It implements a true open systems architecture (OSA) approach that allows for the autonomy capability to be modularly connected to other subsystemswithin the same platform and external to the platform. This plug-and-play modularity minimizes life-cycle costs, enables reuse, and promotes healthy competition among capability vendors. It also reduces overall risk to the program. In addition, the autonomy capability implements the Service Availability Forum industry standards to achieve a high-availability solution that results in near-continuous uptime when the system is fully integrated.
The OSA uses the Society of Automotive Engineers (SAE) AS4 Joint Architecture for Unmanned Systems (JAUS) messaging between major segments and the OMG Data Distribution Service (DDS) message protocol layer to achieve advanced quality of service. The autonomy engine is a set of algorithm-level specifications for the behaviors and capabilities of the autonomy platform. It lists all the important, high-level, mission-oriented tasks either planned or implemented in the context of the vehicle scenario. It employs a modular approach that supports a Distributed Hierarchical Autonomy (DHA) model and uses replaceable, modular and standard interfaces.
After satisfactory completion of SIL testing, the autonomy suite was installed on a 42-foot test vessel, where frequency-modulated continuous-wave and X-band radars provided the sensor input to the autonomy suite, and commands from the autonomy suite were forwarded to the vessels autopilot for control of the rudder and engines. The test vessel acted as an ACTUV surrogate and allowed for testing of all the autonomy software and ACTUV sensor systems in parallel with the ACTUV ship construction. These tests successfully demonstrated a fully autonomous capability in a manner fully compliant with international collision regulations.
According to DARPA's Broad Agency Announcement "ASW Continuous Trail Unmanned Vessel (ACTUV) Phase 1" [DARPA TTO, DARPA-BAA-10-43, February 10, 2010] current unmanned surface vessel systems and concepts are operated as close-adjuncts to conventional manned ships they are launched and recovered from manned ships, tele-operated from manned ships, and are limited to direct support of manned ship missions.
The ACTUV system was a first of its kind unmanned naval vessel that is designed and sized for theater or global independent deployment. It is envisioned that ACTUV will operate under a sparse remote supervisory command and control model, with a shore based supervisor providing high level mission objectives and monitoring autonomous performance through an intermittent beyond line of sight communications link.
A key program focus will be on the ability of the system to demonstrate safe navigation at sea within the framework of maritime law and the International Regulations for Avoiding Collisions at Sea. Additionally, the system will need to autonomously employ its sensor suite consistent with situational awareness and mission objectives, and implement appropriate tactics in response to both target behaviors and external environmental factors. Finally, the ACTUV system will require robust internal state awareness and adaptation to generate the high levels of system reliability necessary to achieve months- long deployments with no underway human maintenance or repair opportunity.
Beyond simply being an unmanned system, the ACTUV program will define new platform performance potential by re-envisioning surface craft design to fully exploit opportunities created by eliminating all crew support requirements. Conventional naval architecture tenants should be examined in this unmanned system context, which in addition to recouping first order crew support overhead, may offer second order benefits such as relaxed reserve buoyancy margins, dynamic stability limits, and even new platform orientation assumptions.
The objective is to demonstrate disproportionate platform capabilities in terms of speed, endurance, sea keeping, and maneuverability. The program will also maintain a strong focus on exploiting novel system architectures and internal arrangements enabled by being unmanned to explore new construction methods and maintenance approaches to achieve disproportionately low system procurement cost and efficient inter-deployment maintenance.
The ability to achieve robust propulsive overmatch in a low cost, unmanned platform creates a disruptive change in ASW operational risk calculus, opening the door to unconventional missions, tactics, and sensor employment. ACTUV system design activity will be underpinned by a set of real world operational objectives to deliver propulsive overmatch against threat submarines and to support tracking over the entire duration of a target submarines deployment.
It is not intended as an ASW search capability. ACTUV relies on conventional force structure to provide a target cue, but then prevents those search assets from being tied up in intensive trail operations. The system design activity will include identification and development of novel sensor modalities and employment methods that can take advantage of the unique unmanned platform configurations and characteristics to achieve robust performance against the most challenging quiet submarine targets.
While the ACTUV concept was first explored under a DARPA study titled Unmanned Naval Vessel (UNV), there is no intent to constrain the ACTUV solution space to this initial concept configuration. Proposers are encouraged to independently explore and validate operational requirements for the intended mission and define their own optimal system concepts. However, the UNV Study does offer insight into potential approaches to achieve program objectives, identification of key system parameters, and examples of relevant system performance assessment.
Due to security requirements associated with submarine targets and specific sensor performance, only U.S. contractors who are capable of receiving, processing, and storing export controlled and classified information associated with this effort are eligible for awards that cover the full scope of the solicitation. Foreign participants and/or individuals may participate as subcontractors or consultants to the extent that such participants comply with any necessary non-disclosure agreements, security regulations, export control laws, ITAR regulations, and other governing statutes applicable under the circumstances. Since DARPA does not intend to directly provide classified or export controlled data to any international participants, proposers are reminded that implementation of applicable agreements and licenses is the responsibility of the proposer.
During a test run in September 2017, the Sea Hunter showed significant progress in COLREG and collision avoidance testing. DARPA also tested the Towed Airborne Lift on Naval Systems (TALONS), which is a low-cost, elevated sensor mast that can carry intelligence, surveillance, reconnaissance (ISR), and communications payloads of up to 150 pounds between 500 and 1,500 feet in altitudemany times higher than current ships mastsand greatly extend the equipments range and effectiveness.
ACTUVs cost is approximately $23 million significantly less than the best-case-scenario $500 million price tag attached to an LCS, with modularity packages ranging from $75-$100M.
|
NEWSLETTER
|
| Join the GlobalSecurity.org mailing list |
|
|
|