

Remote Detection, Challenge, and Response System (REDCAR)
The Remote Detection, Challenge, and Response System (REDCAR) is an Air Force, Force Protection Battlelab (AFFPB) Initiative to demonstrate the benefits of unmanned systems for the security force mission. The Force Protection Branch, Robotics Research and Development Group of the Air Force Research Laboratory is the Technical Developer and Program Manager for the unmanned ground robotic system component of the REDCAR initiative. The Operational requirements for REDCAR development are found in the Integrated Base Defense 2020 Concept of Employment (IBD2020 CONEMP).
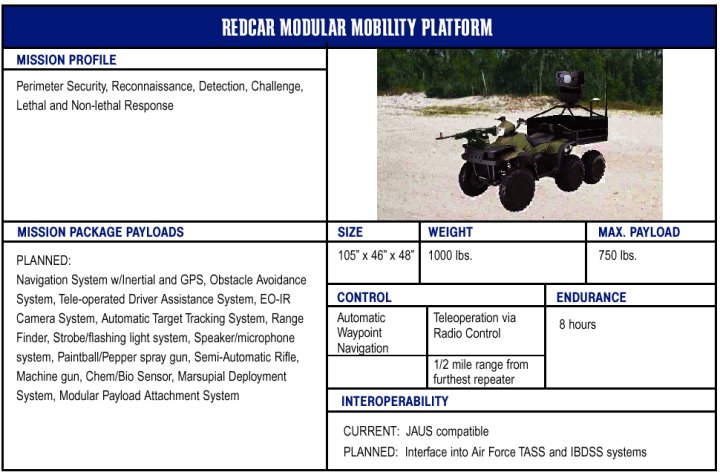
The REDCAR program focuses on the application of mobile unmanned ground systems to support and augment security force personnel in the perimeter defense of Air Force installations and forward deployed units. The AFRL REDCAR system will consist of a network of robotic platforms integrated with existing security force sensors and Tactical, Area Security System (TASS). The REDCAR system will have limited simulation and modeling capabilities to interact with the current AFFPB modeling systems. All components and platforms in the REDCAR system will be capable of communication using JAUS for system interoperability and control.
The robotic platforms for the REDCAR initiative need a wide variety of capabilities. AFRL will develop and integrate technologies for a network of robotic platforms to perform the REDCAR mission. REDCAR will use at least three different robotic platforms: (1) a surveillance platform; (2) an engagement platform, and (3) a small-scale platform for limited access areas.
AFRL is coordinating this initiative with the MDARS-E and Gladiator programs to leverage technologies and synergies between the programs.
The function of the surveillance platform is to perform the area surveillance duties with limited intruder challenge and response capabilities. The surveillance platform will be able to travel up to 15 mph and be able to traverse all types of roads and mild terrain. The platform will have the ability to perform both teleoperated motion and waypoint navigation with obstacle avoidance and path correction. The surveillance platform will carry the primary detection and target tracking sensors, a strobe/flashing light system for gaining the subject's attention, a speaker/microphone system for subject challenge and response, and one type of mild non-lethal weapon. The primary surveillance sensor will be a pan-tilt mounted camera system containing an infrared camera, a color visual camera, and a laser range finding sensor. The surveillance sensor software will be capable of limited feature recognition, target acquisition, and target tracking.
The function of the engagement platform is to perform the challenge, response, and delay components of the REDCAR system. The engagement platform will travel at high speeds (greater than 40 mph), over rough terrain, and through heavily wooded areas. The platform will have the ability to be teleoperated at high speed and perform waypoint travel at moderate speed - 20 mph - on mild terrain. The engagement platform will have an infrared and visual color camera for video feedback and primary driving reference. It will have a strobe/flashing light system, speaker microphone system, a human decoy system, and both non-lethal and lethal weapons systems. The engagement platform will be similar to the AFRL Tactical Infiltration Ground Engagement Robot (TIGER) system.
The function of the small-scale platform is to provide reconnaissance in limited access areas. This platform must be able to enter a standard 30" door opening and be able to climb standard stairwell and building entrance stairs. It will be capable of being deployed from the surveillance platform and teleoperated by both radio frequency and a tethered system. The small-scale platform will contain a zoom camera system with either: (1) illumination; (2) night vision, or (3) infrared capabilities for night and dark area operations. The preferred system will have an arm for opening doors and manipulating objects.
The REDCAR command and control (C2) system will consist of a single laptop computer that will control the robotic network. The backbone of the C2 system will be the JAUS system architecture to provide seamless integration between the various robotic platforms on the network. Using the JAUS common communication protocol allows for minimal operator action to switch between platforms and control the various feature of each platform. System integration will consist of coordination with the AFFPB and SF personnel to determine the scope and specifics of the TASS sensors and components that the REDCAR system should integrate with. Based on this work, AFRL will coordinate with the TASS vendors to make the REDCAR C2 system compatible.
These technologies will be demonstrated in a series of proof-of-concept demonstrations for the Force Protection Battlelab in 2004. Current planned demonstrations include sites with varied terrain,
features, missions, and levels of activity.


|
NEWSLETTER
|
| Join the GlobalSecurity.org mailing list |
|
|
|