

Mobile Detection Assessment and Response System (MDARS)
The Mobile Detection Assessment and Response System (MDARS) is a joint Army-Navy development effort to provide an automated intrusion detection and inventory assessment capability for use in DoD warehouses and storage sites. The MDARS goal is to provide multiple mobile platforms that perform random patrols within assigned areas of warehouses and storage sites. Separate development efforts target warehouse interiors and outdoor storage areas.
The program is managed by the Office of Program Manager - Physical Security Equipment at Ft. Belvoir, VA. Overall technical direction for the program is provided by the Space and Naval Warfare Systems Center, San Diego (SSC San Diego).
MDARS-Interior
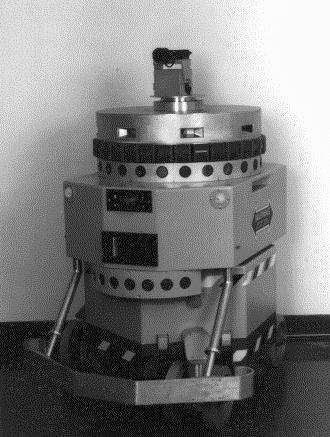
Initiated in 1988, the MDARS-Interior program utilizes the K3A Navmaster mobility base developed by Cybermotion, Inc., of Roanoke, VA, equipped with additional collision avoidance, intruder assessment, and product inventory subsystems by General Dynamics Robotics Systems (GDRS) of Westminster, MD. A Broad Agency Announcement (BAA) contract was awarded to Cybermotion in 1995 to develop a significantly improved intruder detection sensor package with an integrated camera pan-and-tilt mechanism. Simultaneous control of two robots patrolling nightly within an interior warehouse environment was demonstrated for over two years at a beta-test facility at Camp Elliott in San Diego, CA. Two additional robots were operational for almost a year in an Early User Appraisal installation within a Defense Logistics Agency warehouse at Anniston Army Depot in Alabama. The MDARS-Interior Engineering Manufacturing Development contract was awarded to GDRS in 1998. In May-July 2001 the system underwent a successful Limited User Test at the Defense Distribution Depot, Susquehanna, PA.
The Mobile Detection Assessment Response System - Interior (MDARS-I) will provide Commanders at Army, Air Force, Navy, and Defense Logistics Agency (DLA) facilities with an electro-mechanical capability to conduct semi-autonomous, random patrols and surveillance activities, including product assessment and theft detection functions. MDARS-I can be used in a variety of U.S. Army installations: warehouses, office buildings, and hospitals. This system will randomly navigate building interiors, perform intrusion detection, inventory assessment, visual assessment, and audio response. Enhanced capabilities include detection on the move and the employment of response delay devices and the integration of fixed sensors and mobile platforms.


MDARS-Exterior
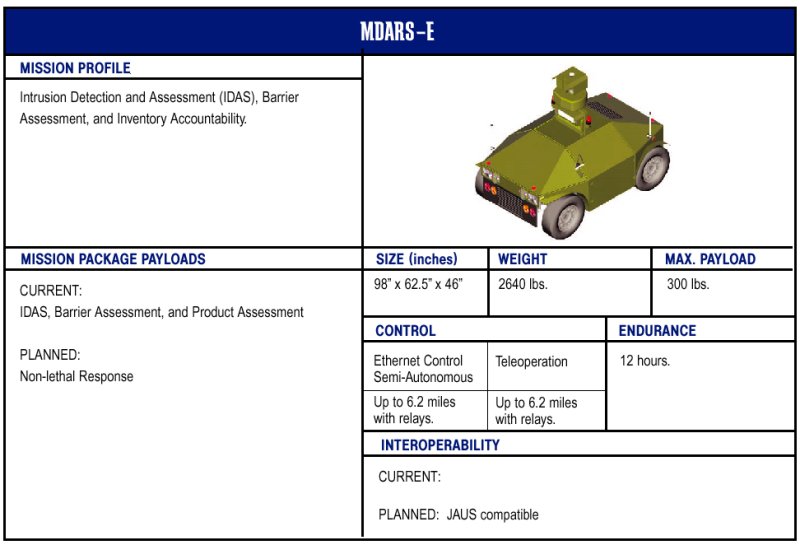
The MDARS-Exterior Program extends the robotic security and inventory control concepts of the Interior program into the realm of semi-structured outdoor environments (i.e., improved roads, defined fence lines, and standardized storage layouts) such as storage yards, dock facilities, and airfields. Inventory control will consist of verifying the contents of closed structures (i.e., warehouses, bunkers, igloos) without the need for opening, as well as inventory of items that are stored outside of structures (planes, HMMWVs, etc).
The Exterior Program, initiated in 1993, awarded a BAA contract for the development of the outdoor mobility platforms to Robotic Systems Technology (RST, now GDRS), Westminster, MD. The mobility base is a rugged four-wheel hydrostatic-drive diesel-powered vehicle equipped with active-laser, ultrasonic-sonar, millimeter-wave-radar, and stereo-vision sensors for collision avoidance. A formal demonstration of autonomous navigation along straight-line path segments under differential GPS control was conducted at the contractor's facilities in October 1996. Automatic collision avoidance and limited intruder sensing (using image-stabilized video motion detection) was demonstrated in September 1997 at the DoD Force Protection Equipment Demonstration held at the Marine Corps Air Station in Quantico, VA. Additional efforts will focus on autonomous transit of non-linear path segments and fully integrated intrusion detection employing both video and Doppler radar. Two BAA prototypes underwent a successful Technical Feasibility Testing in May 2000. A System Development and Demonstration contract was awarded to GDRS in January 2002. An Initial Operational Test and Evaluation (IOT&E) is scheduled to be conducted at Anniston Army Depot, AL in FY06.
The design of the MDARS system is driven by a number of characteristics of the application domain: (1) MDARS must function as a key component of a complete security system that also includes fixed detection capabilities and human security guards; (2) the patrol coverage of a large number (expandable up to 255) of mobile robotic platforms must be controlled and coordinated to minimize opportunities for undetected intrusion, even by insiders; (3) both the interior warehouse and exterior storage site environments require navigational capabilities intermediate between those of an unknown and dynamic environment (e.g., battlefield) on the one hand and a completely structured and static environment (e.g., hospital corridors) on the other.
SSC San Diego is conducting exploratory development efforts to expand MDARS-E force protection capability. These include the addition of a non-lethal gun pod on the exterior vehicle and marsupial carriers that can deploy smaller tracked robots and vertical-takeoff-and-landing unmanned aerial vehicles to provide closeup investigation of off-path incidents.
The Mobile Detection Assessment Response System - Exterior (MDARS-E) will provide commanders at Army, Air Force, Navy, and Defense Logistics Agency (DLA) facilities with the capability to conduct semi-autonomous, random patrols and surveillance activities, including barrier assessment and theft detection functions. MDARS-E can be used in a variety of applications: general storage yards; depots; Arms, Ammunition, and Explosives (AA&E) storage areas; air fields; railyards; and port facilities. The MDARS-E will autonomously conduct surveillance activities checking for intruders, conducting lock interrogations, and assessing the status of facility barriers, such as doors of AA&E storage bunkers. Uses include the detection of unauthorized personnel, verification of barrier and product status, and the remote investigation of an alarm source.






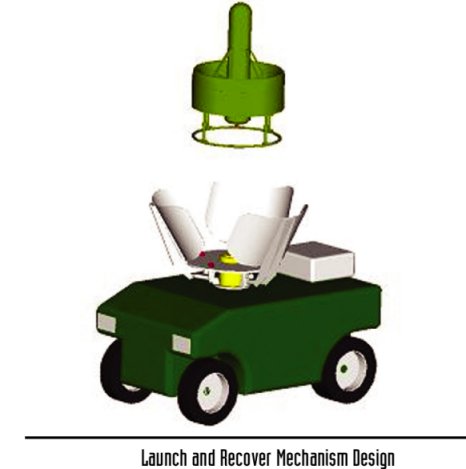
Autonomous UAV Launch/Recovery Payload
The main project goal is to develop a system that allows an Unmanned Arial Vehicle (UAV) to be launched, recovered, and refueled by a host platform in order to provide force extension through autonomous aerial response.
Some of the near-term UAV missions include: (1) reconnaissance; (2) RF communications relays; (3) overhead visual GPS augmentation; (4) surveillance; (5) psychological operations, and (6) mine detection. Future uses include target designation and payload dispersal (i.e., submunitions). Other benefits are seen in the mission flexibility which allows the UAV to be launched from one type of system and captured by another (e.g., launch from a USV and recovered by a HMMVW). It also provides a decrease in time and personnel required to refuel a UAV during mission operations, leading to an increase in the number of missions a UAV can complete in a given period of time.
SSC-SD is working closely with Allied Aerospace, Inc. to develop an initial feasibility demonstration system that is based on the 29-inch iSTAR OAV. During the design process, other possible UAV platforms will be taken into consideration and flexibility for future applications will be incorporated.
Projected users of this UAV Launch/Recovery Payload Module include: (1) COoperative Unmanned Ground Attack Robot (COUGAR); (2) PerceptOR; (3) Naval Surface Warfare (NSW) Group3, and (4) Counter Mine Science and Technology Objective (CM STO). Opportunities for collaboration with other government agencies and publication of lessons learned and design processes will also be pursued as part of this project.


|
NEWSLETTER
|
| Join the GlobalSecurity.org mailing list |
|
|
|