

Morphing UAV - Bian-ti Wu-ren-ji
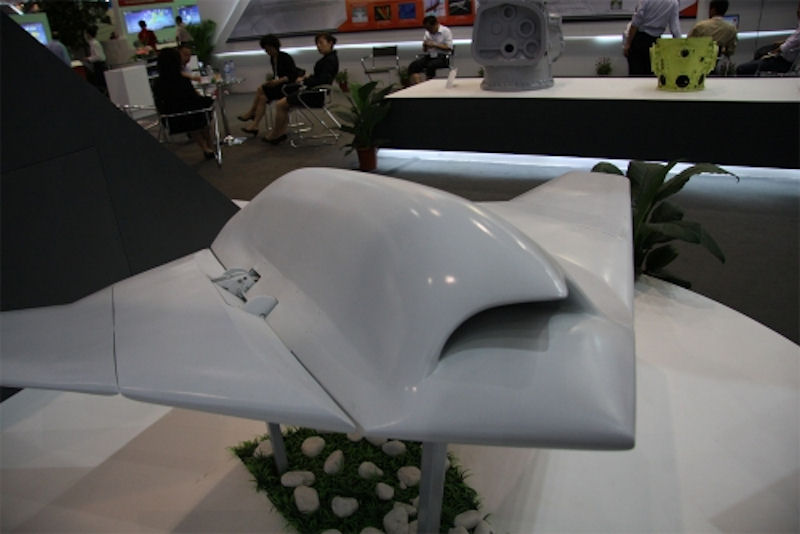
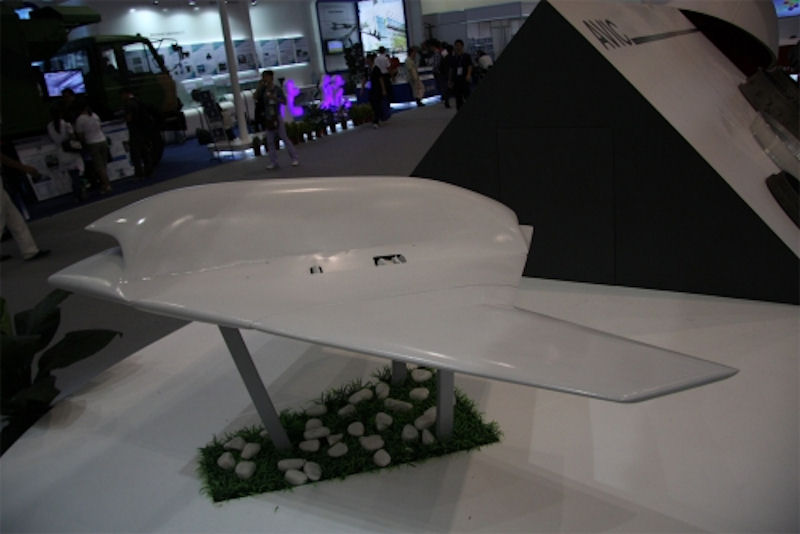
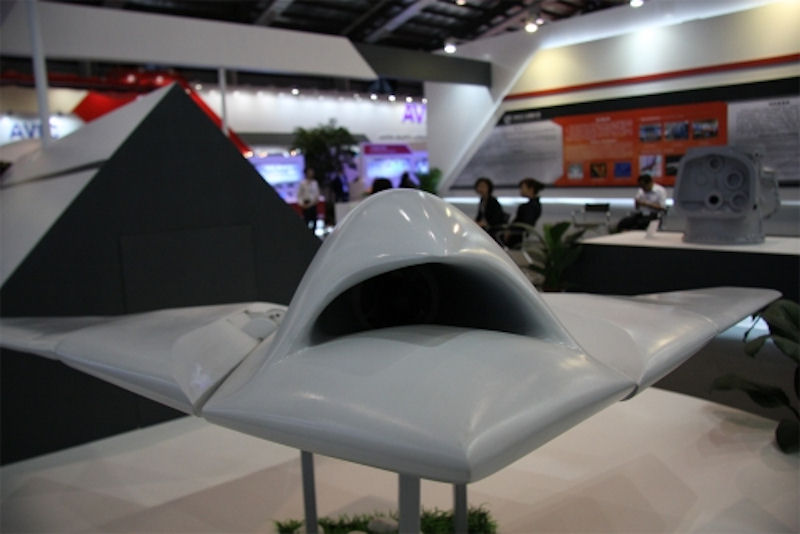
A design for Morphing UAV variant that can change the position of the main wing was developed by Shenyang Aircraft Design Institute (SYADI) of Aviation Industry Corporation of China (AVIC) and Shenyang Aerospace University. Greater wingspan provides better stability at low speed, while at high speed, lesser wingspan helps to reduce drag. Instead of the usual variable-sweep wing configuration, Shape Varying UAV was designed to explore the potential of folding wing design. The experimental UAV of the AVIC 601-S series was first revealed in 2008 during the 7th Zhuhai Airshow, and then faded from view. Some thought it seemed like a good idea at the time. It was a proof of concept flying wing UAV of conventional configuration, based on experience gained from other members of the series. As with other members of the AVIC 601-S UAVs, the inlet of Shape Varying UAV is above the fuselage.
But the fundamental claim to fame of this configuraion, the ability to vary the wingspan of the aircraft, was not in evidence at Zhuhai. The model on display had wings with large joints, but they seemed more suited to simply fold the wings to reduce the footprint of the aircraft in a hangar, such as that of an aircraft carrier. There are no immediately available photograps of this model morphing the wingspan as described. Although various Chinese investigators examined morphing wing concepts, and several filed patents for them, these tabletop wind-tunnel models were never embodied in large flight vehicles. These clunky contraptions that did not entail the sleek configuration such as that displayed by AVIC at Zhuhai.
At present, countries in the world are exploring this kind of aircraft. Lockheed Martin's small variant UAV developed for the U.S. Defense Advanced Research Projects Agency (DARPA) first flew in 2006. The DARPA Morphing Aircraft Structure (MAS) program aimed to enable future multi-purpose aircraft to change their shape to accomplish different tasks. The wingspan of the Lockheed Martin verification aircraft is approximately 6 feet (1.83 meters). MAS planned to develop a 10,000-pound (4,500 kilogram) demonstrator at some future stage. After that, DARPA plans to transfer the technology to the U.S. Air Force or U.S. Navy.
The Chinese deformable unmanned aerial vehicle model was very rough, especially the folding point. If it is put into practical application, it is unlikely that it will still be like this. The conceptual model of the variant aircraft is only a rough structural model, which is slightly abstract like its concept, and it is easy to be regarded as a drone and ignore its true value.
This conceptual model actually represents a technological innovation. The "Morphing" of this model are mainly reflected in the folding of the wings. When needed, the wing closes to the part of the fuselage while the other part remains level with the ground. When the aircraft is flying at low speeds, the wingspan must be as wide as possible to ensure stability; while at high speeds, the wings must be shortened to reduce drag. In order to overcome this contradiction, the wings of the "variant aircraft" can be retracted inward or deployed out as needed to maximize flight efficiency.
The aircraft using this concept can select the corresponding flight attitude according to the needs of different situations, so as to meet different flight performance requirements. In fact, this concept is somewhat similar to the design concept of variable swept wings. However, from the perspective of the degree of change, this variant conceptual model obviously exceeds the variable swept wing.
The conceptual model also had considerable technical difficulties. For the corresponding aircraft, how to maintain sufficient body strength and reliability while implementing variants is a problem that must be considered. This concept technology can be applied to all kinds of military aircraft. It is speculated that the most suitable application of this conceptual model is the carrier-based aircraft. Many models of foreign carrier-based aircraft use wing folding technology to save space on the hull. The conceptual model only needs to make one more folding point than the carrier-based aircraft, and the corresponding performance cost that needs to be paid is easily controlled within an acceptable range, and it is made up for by the variable flight performance advantages brought by the variant concept.
The configuration change control method of the variant UAV includes: real-time monitoring of the flight of the variant UAV Speed; when it is determined that the flying speed of the variant UAV at the current moment crosses the preset critical flight speed, according to the preset first switchability criterion, it is determined whether the variant UAV can change configuration; if so , Transform the configuration of the variant drone; if not, transform the configuration of the variant drone into an intermediate configuration, and proceed to the next step; according to the preset second switchability criterion, Determine whether the variant drone can be transformed from the intermediate configuration to the high-speed configuration or the low-speed configuration; if so, transform the variant drone from the intermediate configuration to the high-speed configuration or the low-speed configuration. If not, it indicates that the configuration of the variant UAV continues to maintain the intermediate configuration.
The variant aircraft has good aerodynamic performance. It can change the configuration for different flight speeds, so that its aerodynamic shape can adapt to both high-speed and low-speed flight environments. For the variant UAV, in addition to solving the flight stability problem during the configuration change process, it is also necessary to formulate the corresponding control rate, send the configuration change command signal to the UAV flight control system, and activate the corresponding drive device to complete the flight control system.
When the flight speed of the variant UAV approaches or just crosses the critical speed, if the configuration is changed immediately, due to the discontinuity of the system, the flight speed of the UAV may immediately cross the critical speed again. If there is no configuration changeable criterion, the UAV may frequently issue instructions to change its configuration near the critical speed, causing oscillation or even instability of the flight.




|
NEWSLETTER
|
| Join the GlobalSecurity.org mailing list |
|
|
|