

Man Portable Robotic System (MPRS/URBOT)
Funded by the Department of Defense Joint Robotics Program, the MPRS program goal is to develop lightweight, man-portable mobile robots for operation in urban environments (indoor, outdoor and underground). The technical strategy calls for optimizing a realistic and robust solution to an appropriate set of articulated user requirements, using predominantly off-the-shelf components. The capabilities and sophistication of these systems will expand with time as new technologies become available from various sources. The Unmanned Ground Vehicle/Systems Joint Program Office (UGV/S JPO) is the Program Manager for MPRS, while SPAWAR is responsible for all technical design and system integration.
The initial MPRS system was implemented under a reflexive teleoperated control interface (developed on ROBART III), supported by ultrasonic and near-infrared collision avoidance sensors. A preliminary prototype was developed to facilitate meaningful user feedback that influenced the follow-on design of a more capable second-generation solution. This first-generation MPRS prototype was evaluated in conjunction with the US Army Combat Engineers Tunnel and Sewer Concept Experimentation Program (CEP) held at Ft. Leonard Wood in the fall of 1999. The purpose of the CEP was to validate the concept of employing small robots to conduct tunnel, sewer, and bunker reconnaissance in urban combat.
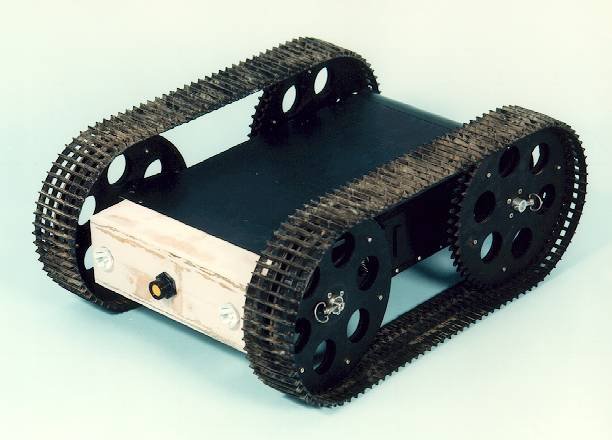
The prototype was based on a modified Foster-Miller Lemming base. The stock Lemming is a small, inexpensive (basically expendable) tracked robot that can be remotely operated with a simple joystick or push-button controller via a serial RF link. The MPRS configuration (Figure 1) employed the mechanical elements (chassis, drive motors, gearboxes, tracks, and drive sprockets) of the Lemming, but substituted more sophisticated electronics, sensors, and an upgraded Operator Control Unit (OCU).
Sensors included three forward- and two side-looking sonars, and two five-element arrays of Sharp near-infrared triangulation ranging sensors, a pair of Precision Navigation electronic compasses, and four miniature pin-hole cameras with dual halogen headlights. The platform was designed to be fully invertable (i.e., it can operate upside down or rightside up with no preference), as opposed to self-righting. An attitude sensor automatically determines which set of Sharp rangefinders and which video camera to use in case the robot flips over. The onboard software also inverts the sense of incoming drive and steering commands to preserve a normal mobility response.
Two processors are used to control vehicle functions. The primary processor, located in an electronics box behind the snout, is responsible for driving (navigation) and telemetry functions. A secondary processor within the snout is responsible for sensor data collection and headlight intensity control.
The electronics enclosure also houses a text-to-speech voice synthesizer employed to inject audio prompts into the telemetry stream returning to the controller, and to output warning messages at the vehicle. Real-time digital video and audio (along with command and control data) are passed between the robot and the operator control unit over a wireless Ethernet link. The digital video/audio system employs a hardware-based CODEC that provides between 15 and 20 frames of digitized video per second. The CODEC is also capable of providing bi-directional audio between the OCU and the robot, which allows for two-way verbal communication with a hostile element.
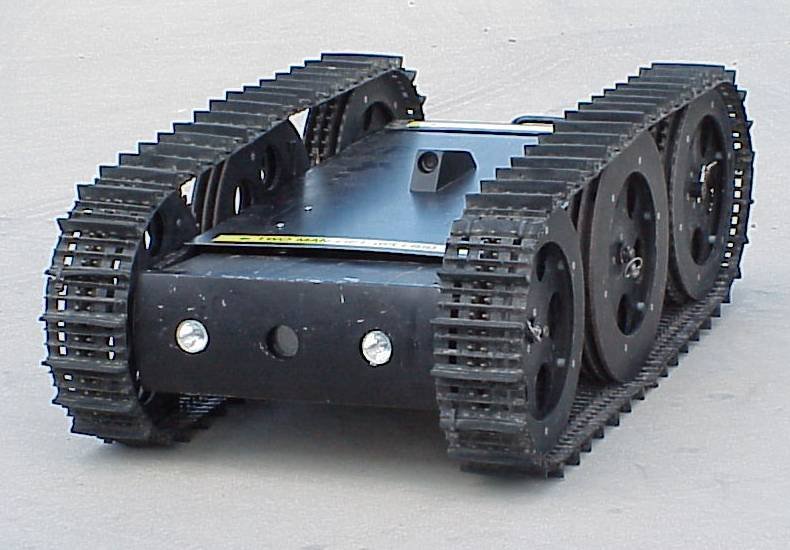
Based on the extensive user feedback obtained from on-site evaluations at the Fort Leonard Wood CEP, a number of significant changes have been incorporated into the design of a much-improved second-generation MPRS platform. The platform chassis was upgraded from the Lemming to a variant of the six-wheel Foster-Miller Tactical Adjustable Robot (TAR), with the length fixed at 33 inches (i.e., no longer adjustable) to save weight. The center sprocket was increased in diameter from 10 to 11 inches, thus providing 0.5 inches of "high-center" effect (even if inverted) to facilitate turning.
For detailed viewing of objects in the environment, a camera system was installed in an articulated Sensor Snout with the capability to tilt as much as 90 degrees above or below the horizontal. Equipped with a 24X zoom, auto-iris, and automatic focus, the system also has provision for external computer control. A low-silhouette pair of fixed-focus auxiliary "drive cameras" were added to the top and bottom cover panels of the robotic chassis. This mounting configuration provides an approximated over-the- shoulder viewing perspective that includes the left and right forward drive sprockets, thereby significantly augmenting the operator's perception of vehicle orientation with respect to perceived obstacles. An additional fixed camera was mounted on the rear of the robot to support driving in reverse.

|
NEWSLETTER
|
| Join the GlobalSecurity.org mailing list |
|
|
|