

Advanced Unmanned Search System (AUSS)
![[AUSS]](images/auss.jpg) The Advanced Unmanned Search System (AUSS) represented a major breakthrough in the Navy's ability to perform search in the deep ocean. AUSS was the product of twelve years of development by a small, dedicated team of SSC San Diego designers/operators. The system was based on a radically different approach to the problem of deep search, one which totally eliminated the classic long cable.
The Advanced Unmanned Search System (AUSS) represented a major breakthrough in the Navy's ability to perform search in the deep ocean. AUSS was the product of twelve years of development by a small, dedicated team of SSC San Diego designers/operators. The system was based on a radically different approach to the problem of deep search, one which totally eliminated the classic long cable.
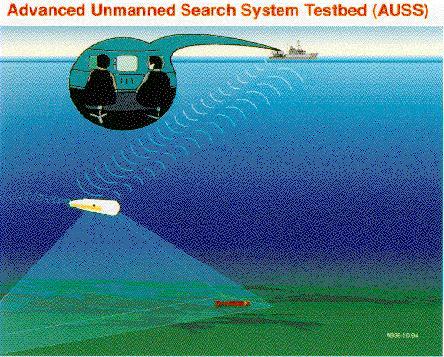
The heart of the system was a vehicle that was both unmanned and untethered, yet provided human operators with nearly realtime data and control. Operators on the surface ship could evaluate search images, status information, and navigation data, and direct the mission, but with no cable. Instead of miles of cable, AUSS used an acoustic data link for communication between the vehicle and ship (see Figure 2). The result was a supervisory controlled UUV, capable of both rapid search and precise inspection at depths as great as 20,000 feet.
{kind=link}
AUSS is compact and portable, easily fitting on an offshore supply boat. The entire search system consists of the vehicle, a control van, a maintenance van, a launch and recovery ramp, and a shallow tow fish. The vehicle is launched down the launch and recovery ramp (Figure 3), and is pulled to the bottom on a weighted line. At the end of the mission the vehicle is commanded to drop an ascent weight, floats to the surface, and is recovered up the ramp. For 20,000 feet, descent and ascent times are about an hour each.
{kind=link}
The acoustic link transmits compressed search data to the surface at rates up to 4800 bits per second, and sends high level commands to the vehicle at 1200 bits per second. Joystick type control is not necessary because all critical control loops are closed on the vehicle. The operator tells the vehicle where to go and what to do, not how to do it. The vehicle's computers use a Doppler sonar and a gyrocompass to perform onboard navigation. The vehicle can be commanded to go to a specific location and hover there, or to execute large search patterns without assistance. It autonomously performs each task until it is completed or until the operators interrupt with a new command.
The primary search sensor is a side looking sonar (SLS) with a maximum 2000 foot range scale, or 4000 foot swath. A scanning forward looking sonar (FLS) is used for closing in on sonar targets. A charge coupled device (CCD) electronic still camera is used to quickly identify "false targets" (which on sonar resemble that which is sought), and to perform detailed inspections of items of genuine interest. Data from these sensors are treated as images, which are compressed and acoustically transmitted to the surface.
A surface computer decompresses the images and displays them. Vehicle navigation data within the images permit the operator to acquire the coordinates of objects by merely placing a cursor over them. An object seen on the SLS display is marked in that manner, and search is suspended while the object at those coordinates is investigated. If the target is not that which is sought, a single command causes SLS search to automatically resume from where it was suspended. False targets can be investigated in ten to 15 minutes. Hours can be spent inspecting an interesting object. On one dive, over 450 images were transmitted, half of which were CCD images.
The surface AUSS integrated navigation system performs both ship's navigation and vehicle tracking, using inputs from several modern navigation systems. Ship's surface navigation sensors include Global Positioning System (both standard and differential), shore based radar transponders, Loran-C, a long-baseline deep-ocean transponder system, and a gyrocompass. The vehicle is also continually tracked from the ship, completely independently of its own onboard navigation system. This is done with either a short-baseline acoustic system, or with the long-baseline system in standard "fish cycle" mode or in special AUSS modes of operation.
The AUSS vehicle is designed to operate as deep as 20,000 feet. It is 17 feet long, 31 inches in diameter, and weighs 2800 pounds. The center section is a cylindrical graphite epoxy pressure hull with titanium hemispherical ends. The hull provides the central structure and all its buoyancy. No syntactic foam is used. The free-flooded forward and aft end fairings and structure are of Spectra, a nearly buoyant composite.
At its maximum speed of five knots, the endurance of the AUSS silver-zinc batteries is ten hours. Recharging requires 20 hours. Typical missions have been ten to fifteen hours. Three sets of batteries would allow AUSS to operate indefinitely, with only 3-1/2 hours between 20,000 foot dives.
In the summer of 1992, the system performed a series of sea tests off San Diego culminating in a 12,000 foot operation. AUSS conducted side looking sonar search at five knots, and performed detailed optical inspections of several objects that it found. It proved capable of sustained search rates approaching a square nautical mile per hour, including the time spent investigating false targets.
During the tests AUSS searched for, found, and inspected a World War II Douglas SBD Dauntless dive bomber in 4000 feet of water, (see Figure 4, below) and a test target (Figure 5) which had been placed in 12,000 feet. The location of the test object was fairly well known, but the Dauntless search covered several square miles. AUSS also discovered several previously unknown objects, the most interesting of which were a Korean War vintage Douglas AD Skyraider night fighter (Figure 6) and a 55 foot private yacht (Figure 7). Both were found and inspected on a single dive at 4000 feet.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
The AUSS System was transferred to the Navy's Supervisor of Salvage and Diving in 1994.
|
NEWSLETTER
|
| Join the GlobalSecurity.org mailing list |
|
|
|