

BQM-108 VATOL
The NSRDC BQM-108 was an experimental Vertical Attitude Takeoff and Landing (VATOL) drone designed in 1976 at the US Navy David W. Taylor Naval Ship Research and Development Center. The design of the NSRDC BQM-108 began by American specialists in the early 1970s. Vertical takeoff and landing capability was being assessed by the Navy for both manned and unmanned aircraft. In the unmanned aircraft sector, progress in the development of lightweight avionics had been the stimulus behind Navy interest in remotely piloted vehicles (RPVs). Analyses have indicated that RPVs can be as much as 60 percent lighter and cost only onethird as much as comparable manned aircraft suitable for similar missions.
Unmanned RPVs can be designed to fly long endurance missions unencumbered by the constraints imposed on manned aircraft and to be highly maneuverable against heavily defended targets. This can significantly reduce pilot attrition when manned aircraft are lost during such missions. The advantages attributed to RPVs can enhance Navy air support capabilities and can favorably complement manned aircraft.
Over the horizon targeting (0TH) was one mission that the Navy had identified as suitable for RPVs. It had also been determined that vertical launch and recovery will enable these new RPVs to operate from nonaviation ships. The 0TH mission had increased importance because of the threat represented by the Soviet buildup of offensive capability through the use of cruise missiles. This was having a profound effect on naval tactics. Captain Rube (U.S. Navy, Retired) stated that the Soviet sea strategy is to use cruise missiles in a brief , massive, coordinated, surprise strike. This strike strategy was designed to gain the initiative in the first salvo and then to maintain that advantage. Captain Rube reported that a 90sec response is their goal for coordinated strike timing.
ArabIsraeli conflicts and the IndoPakistani war of 1971 were the only sources of information on tactical experience in the use of cruise missiles. The importance of advanced warning, however, was conveniently demonstrated in the ArabIsraeli War of October 1973. In that action, the Israelis were made aware of missile launchings from Arab patrol boats in sufficient time to optimize their own electronic warfare and maneuvering tactics. They were able to prevent hits even though 55 Styx cruise missiles were fired in one engagement.
RPVs could be used to keep Soviet ships and aircraft under surveillance and give friendly forces the time needed to defend against a surprise strike and to provide targeting information for counterattacks by the Harpoon or Tomahawk missile.
The US Navys manned aircraft operational capability could be extended to smaller aviationcapable ships, thus greatly expanding naval air support capability. This is also prompted by the Soviet cruise missile threat. Since all Soviet cruise missiles had very 1arge warheads, their main purpose was to attacke American capital ships by brute force and to achieve absolute certainty of destruction when the opportunity is presented to attack. The capability to disperse carrier aircraft could counter this Soviet strategy.
The launch and recovery problem (then associated only with RPVs) was investigated at DTNSRDC. Vertical attitude takeoff and landing (VATOL) was found to offer several unique advantages over the other approaches to the problem of launching and recovering aircraft including RPVs. (This can be especially true for supersonic fig hter aircraft that have higher thrust to weight ratios). This vertical concept was first developed by the Ryan Aeronautical Company nearly 20 years earlier. In hover, their design (the X 13 Vertijet) used a swiveled nozzle at the engine exhaust for pitch and yaw control and a jet reaction control system located outboard on the wing for roll control.
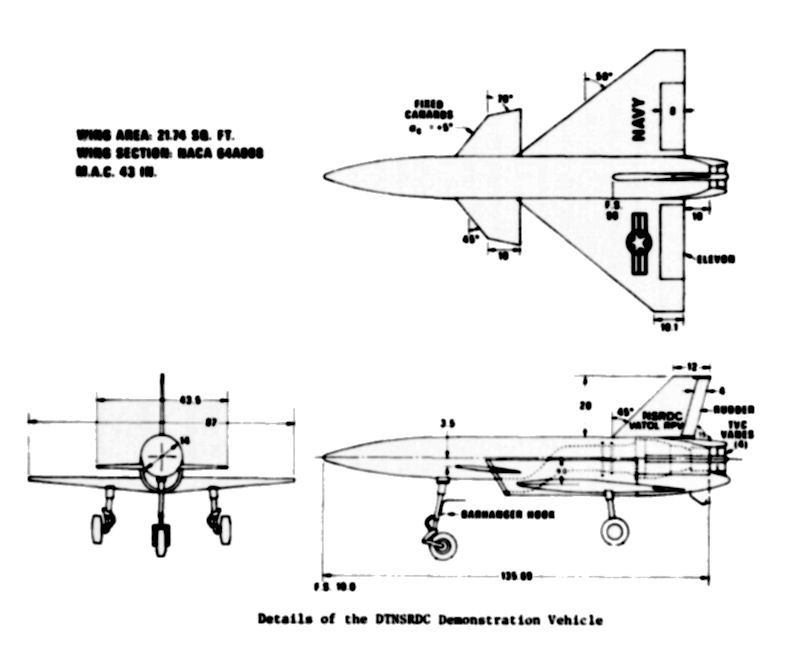
The design incorporates a close-coupled canard/delta wing configuration that utilizes components from the MQM-74A target drone as well as the Harpoon missile. A closecoup led canard (fixed for this demonstration was employed to extend maximum lift (over 50 percent). This increased lift aided the transition from horizontal to vertical flight and also reduced conventional horizontal runway landing speed. A single vertical tail was used for directional stability during horizontal flight. Elevons on the wing and a rudder on the vertical tail were used for horizontal flight control. The wing, canard, and vertical tail were constructed of aluminum stringers and plates and covered with highdensity styrofoam bonded to layers of fiberglass. The elevons and rudder were made of mahogany.
During the initial sizing and design phase, a survey of available engines indicated that the Teledyne CAE XJ402 (used earlier in the design phase of the Harpoon missile) was an attractive engine candidate. Not only can it generate 660 lb (uninstalled, sea level) of static thrust but it also possesses an enginemounted DC alternator.
The Harpoon midcourse guidance unit (MGU) was used to stabilize the demonstration vehicle in flight. The MGU is an integrated package designed to provide guidance and control from takeoff to terminal guidance takeover. It served as both an autopilot and am inertial navigator by means of an attitude reference assembly (ARA) in a strap down inertial sensor configuration, a digital computer autopilot (DCA), and a selfcontained power supply.
Despite the fact that the drone NSRDC BQM-108 was designed in the early 1970s, the device had rather compact dimensions of its fuselage - at length in 3 meters 58 centimeters, unmanned vehicle has a wingspan in 2 meters 21 centimeter. The Powerplant of the NSRDC BQM-108 was a single turbojet Teledyne CAE YJ402-CA-400, which is having a thrust in 2.9 kN. It was able to overclock the device to the maximum airspeed in 645 km/hr. While the duration of stay in the air this drone limited 30 minutes.
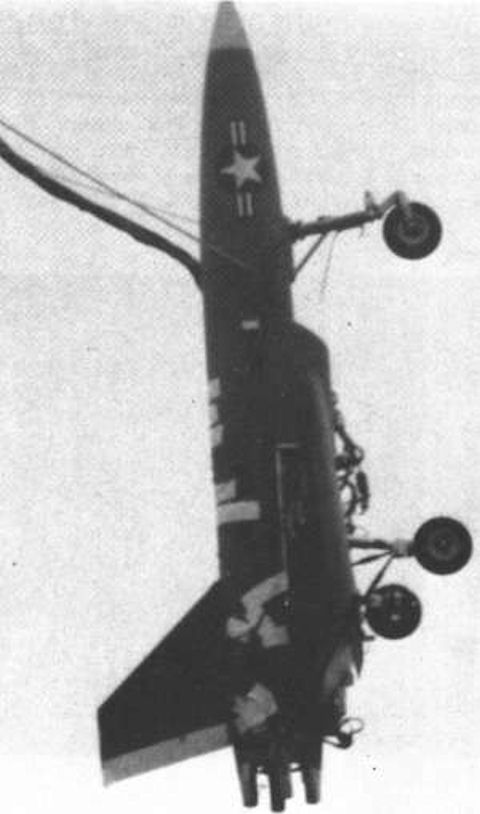
The vehicle was to be used by the US Navy as a reconnaissance drone, however, since aerospace technicians did not have enough experience in developing unmanned vertical takeoff and landing equipment, the project initially had only an experimental purpose. The tethered hover flight tests began at DTNSRDC during the summer of 1976. A trapeze support bar was attached to the nose of the vehicle to allow it to be suppo rted in the vertical attitude by a crane. With the vehicle in this attitude, the hover capability of the autopilot/jet vane was observed.
Tethered hover flight was uccessfully achieved on 29 September 1976. The vehicle was moved to the test position, the tethered lines were released and the compu terrun switched on at the control console. After the gyroscope selfleveled light came on, the engine speed toggle switch on the control console was switched to Run. The XBQM-108A conducted no free flights, or transitions to horizontal flight.
An RPV missioncapable design of the same size would make extensive use of Keviar or similar materials to reduce the airframe weight. Estimates indicate that the airframe structure could be cut to about 110 lb. This would allow more fuel to be added to extend range or endurance. The use of a turbofan engine instead of the turbojet initially employed could also increase range considerably. The Williams Fl07WRlO0 turbofan engine utilized for the Tomahawk cruise missile could easily be adapted to fit this airframe.
Subsequently, due to the fact that the series of test tests of the NSRDC BQM-108 failed, the project was closed, however, in the future, many other models of unmanned aerial vehicles were realized on its basis.
| Length | 3.58 m |
| Wingspan | 2.21 m |
| Height | 0.7 m |
| Maximum takeoff weight | 254 kg |
| Cruising flight speed | 500 km/h |
| Maximum flight speed | 645 km/h |
| Maximum flight distance | 100 km |
| Maximum flight height | 5100 m |
| aircraft engine Type | Jet |
| Powerplant | Teledyne CAE YJ402-CA-400 |
| Power | 2.9 kN |
|
NEWSLETTER
|
| Join the GlobalSecurity.org mailing list |
|
|
|